1.没有买过模型,不过看图似乎MS的很多关节没有明显的液压杆,也有些地方有,那么没有液压杆的那些地方的驱动方式是怎样的呢?现实中有可以类比的东西吗?
2.如果在现实中没有同样原理的东西,那么如果用液压杆来实现的话是否会导致活动范围及其有限?
3.如果所有需要驱动的地方都用液压杆(假设目前机器人用的伺服电机的扭矩都不够),那么制造出MS是否可行(不论作战能力)?比如有两个中央压力容器A和B,有油泵维持A内的压力始终高于B,每个液压杆都通过管道连接到A和B并用阀门控制……我没学过机械,有更好的方案不……
不一定要做出那么高大的ms,也不一定要坐人在里面,这样有可行性吗?
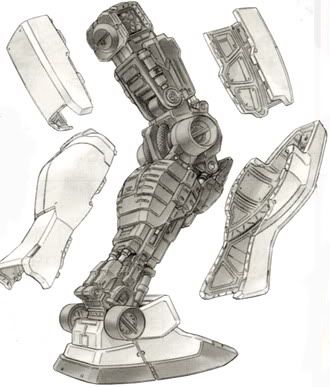
腿部肩部这些运动量大的,要承受大冲击力的关节会有液压系统来做冗余和补助,但主要的还是里面的电机。我说过了电机就是马达,你的明白?
原帖由
sjinny 于 2011-4-9 00:02 发表

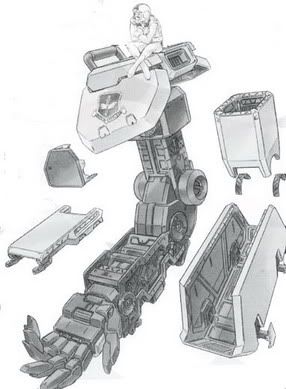
3楼的图里看不出肩关节的驱动方式
我也看到了一些地方使用了液压杆,那么按照UC的背景,什么情况是更适合液压杆的呢(相对于肩部的那种驱动形式)
“磁流脉冲”或“场驱动”具体的原理是否有现实基础呢?特别是有些地方采用液 ...
原帖由
sjinny 于 2011-4-10 16:27 发表
“流体驱动马达”或“Field Motor”有说具体原理吗……如果和现在的电机一样,那么手持重物时肩关节是怎么保持在一个角度上的呢……
关于6,木马出大气层可能是我记错了,不过83里的似乎片头还是哪里有个镜头貌似是飞得很 ...
原帖由
CC8P 于 2011-4-11 17:20 发表
强袭机应该加强重要部位的装甲而不是消减吧?再薄还能薄过06/07?
原帖由
CC8P 于 2011-4-11 17:20 发表

强袭机应该加强重要部位的装甲而不是消减吧?再薄还能薄过06/07?
原帖由
sjinny 于 2011-4-10 23:08 发表
“*发电机所产生的能量*通过压缩机转换为压力”……“为此省略了能量*转换成电力*的过程”……

原帖由
sjinny 于 2011-4-10 23:08 发表
另外扎古的肩关节的“摆动气缸”是什么样的有设定吗?
原帖由
sjinny 于 2011-4-10 23:08 发表
I Field与M粒的相互作用是怎么转化为驱动关节的力矩的…… ...